Sep 2020 - Jul 2021
:: CMU's IRIS Lunar Rover
#c/c++
#embedded systems
#rtos I helped develop the C&DH flight software for IRIS, CMU’s Lunar Rover. The flight software uses NASA JPL’s F-Prime flight-software framework on top of FreeRTOS. The C&DH is a TI Hercules Safety-Microcontroller.
Oct 2020 - Dec 2020
:: How to Write Low Power Code for the IOT Semester Project (CMU 18-747)
#c/c++
#embedded systems
#python
#algorithms
The USGS measures stream flows since they are critical for long-term tracking and modeling/forecasting to ensure that federal water priorities and responsibilities can be met and that the nation’s rivers canbe effectively managed. Recently, the USGS has been looking at non-contact methods of collection this data which would allow USGS scientists to gather data more safely and possibly without even going in to the field. One such method is large-scale particle image velocimetry (LS-PIV). LS-PIV is a special case of algorithms that perform optical flow; at its is a cross correlation operation which is expensive in both time complexity and energy usage. My peers and I optimize the PIV algorithm to run on a 32-bit embedded microcontroller that can quickly and accurately perform the PIV computation and have a battery life of up to 2 years.
Nov 2016 - Jul 2020
:: Lab Manager • Ground Station Lead • Electrical Engineer
#pcb design
#embedded systems
#microcontrollers
#cubesat
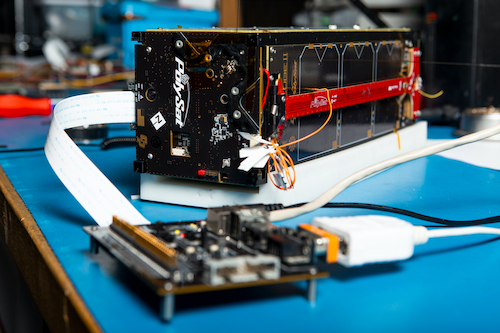
I designd flight hardware and software for CubeSats, developed hardware and software interfaces with testability in mind, and led the lab through a sprint where the lab was producing multiple flagship missions at once.